AKoormusanduron teatud tüüpi muundur või andur, mis muundab jõu mõõdetavaks elektriliseks väljundiks. Tüüpiline koormusandur koosneb neljast Wheatstone'i silla konfiguratsioonis olevast pingeandurist. Tööstuslikus mastaabis seisneb see muundamine koormuse muundamises analoogseks elektrisignaaliks.

Leonardo Da Vinci kasutas mehaanilisel hoova peal kalibreeritud vastukaalude asukohti tundmatute kaalude tasakaalustamiseks ja määramiseks. Tema konstruktsioonide variatsioonides kasutati mitut kangi, millest igaüks oli erineva pikkusega ja tasakaalustatud ühe standardkaaluga. Enne kui hüdraulilised ja elektroonilised tõmbetugevusandurid asendasid mehaanilised hoovad tööstuslikes kaalumisrakendustes, kasutati neid mehaanilisi kangkaalusid laialdaselt. Neid kasutati kõige kaalumiseks alates tablettidest kuni raudteevaguniteni ja see tegi seda täpselt ja usaldusväärselt, kui need olid korralikult kalibreeritud ja hooldatud. Need hõlmasid kaalu tasakaalustamise mehhanismi kasutamist või mehaaniliste hoobade tekitatud jõu tuvastamist. Varaseimad tõmbetugevusanduritega jõuandurid hõlmasid hüdraulilisi ja pneumaatilisi konstruktsioone.
1843. aastal töötas Briti füüsik Charles Wheatstone välja sillaskeemi, mis suutis mõõta elektritakistusi. Wheatstone'i sillaskeemi abil saab ideaalselt mõõta pingeandurites toimuvaid takistusmuutusi. Kuigi esimene ühendatud takistustraadist pingeandur töötati välja 1940. aastatel, muutus uus tehnoloogia tehniliselt ja majanduslikult teostatavaks alles siis, kui moodne elektroonika sellele järele jõudis. Sellest ajast alates on pingeandurid aga levinud nii mehaaniliste kaalukomponentidena kui ka eraldiseisvate koormusanduritena. Tänapäeval domineerivad pingeandurid kaalumistööstuses, välja arvatud teatud laborid, kus kasutatakse endiselt täppismehaanilisi kaalusid. Pneumaatilisi koormusandureid kasutatakse mõnikord seal, kus soovitakse sisemist ohutust ja hügieeni, ning hüdraulilisi koormusandureid kaalutakse kaugemates kohtades, kuna need ei vaja toiteallikat. Pingeandurid pakuvad täpsust vahemikus 0,03% kuni 0,25% täisskaalast ja sobivad peaaegu kõigiks tööstuslikeks rakendusteks.

Kuidas see töötab?
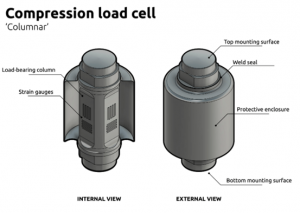
Koormusandurite konstruktsioonid liigitatakse vastavalt genereeritud väljundsignaali tüübile (pneumaatiline, hüdrauliline, elektriline) või vastavalt sellele, kuidas nad kaalu tuvastavad (kokkusurumine, pinge või nihe).HüdraulilineKoormusandurid on jõu tasakaalustamise seadmed, mis mõõdavad kaalu sisemise täitevedeliku rõhu muutusena.Pneumaatilinekoormusandurid töötavad samuti jõu tasakaalustamise põhimõttel. Need seadmed kasutavad mitut summutit
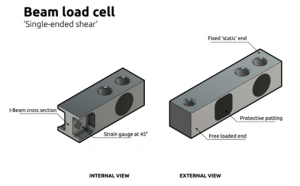
kambrid, et tagada suurem täpsus kui hüdraulilisel seadmel.PingemõõturKoormusandurid muudavad neile mõjuva koormuse elektrilisteks signaalideks. Mõõturid ise on kinnitatud tala või konstruktsioonielemendi külge, mis deformeerub raskuse rakendamisel.
Postituse aeg: 06.05.2021