I. Süsteemi ülevaade
1. Projekti taust
Viimastel aastatel on ebaseaduslik maanteekaubaveokite vedu muutunud tõsiseks probleemiks, mis ohustab riigi liiklusohutust. See koormab maanteid ja sildu üle, lühendades oluliselt nende kasutusiga; samal ajal väheneb oluliselt sõidukite ohutustegur, põhjustades pidevalt liiklusõnnetusi; samuti on lihtne tekitada liiklusummikuid ja keskkonnareostust.
Valitsused kõigil tasanditel üle kogu riigi on pidevalt suurendanud oma jõupingutusi maanteesõidukite ülekoormatud transpordi kontrollimiseks ja on saavutanud olulisi järkjärgulisi tulemusi. Keeruliste sotsiaalsete ja majanduslike tegurite tõttu on ülekoormuse avastamise olukord riigis siiski endiselt väga tõsine ning varjatud tagasilöögiohtu pole kõrvaldatud; juhtimise tulemuste konsolideerimine ja ülekoormuse avastamise töö pidev edendamine on endiselt suure surve all. Seetõttu on ülekoormatud sõidukite transpordi juhtimine pikaajaline ja igapäevane töö, millega tuleb järjekindlalt jätkata. Ülekoormuse töö juhtimise lisamine pikaajalisse mehhanismi on ülioluline. See mängib ka ülekoormatud sõidukite puhul õiguslikku hoiatavat rolli ning saab laiendada oma funktsioone, et muuta see liikluskontrolliks, võidelda ebaseaduslike vedude juhusliku mentaliteedi vastu ning õigeaegselt kontrollida ja kõrvaldada mitmesuguseid ebaseaduslikke vedusid, sealhulgas ülekoormatud vedusid.
2. Kaalumissüsteemi tutvustus
Staatilise veoautokaalu põhimõte on parkida kõik sõidukid kaalumisplatvormile ja kaaluda kogu sõiduk. Sellel on kõrge kaalumistäpsus ja selged riiklikud standardid. Tavapärane veoautokaal suudab aga mõõta ainult kogu sõiduki kaalu, mitte telgede raskust. See suudab hinnata, kas kogu sõiduk on ülekoormatud, kuid ei saa hinnata, kas telgede raskus on ülekoormatud. See ei vasta maanteeameti nõuetele ülekoormatud transpordi haldamisel.
See plaan ühendab meie ettevõtte aastatepikkuse kogemuse ülekoormustuvastusseadmete projekteerimisel ja tootmisel ning nende tegeliku rakendamise riigi eri piirkondades, uurib hoolikalt turul olevate erinevate ülekoormustuvastusseadmete kasutamist ning arvestab põhjalikult maanteehalduse osakondade erivajadustega ülekoormatud transpordi haldamisel. See kasutab täiustatud tehnoloogiat ja ainulaadseid disainiideid, et arendada dünaamiline ülitäpne sõiduki kaalu ja teljetüübi tuvastussüsteem. See suudab kaaluda nii teljekaalu kui ka kogukaalu ning eristada teljetüüpe. Samuti saab oluliselt parandada teljekaalu täpsust.
2. Ülekoormuse ja ülekoormuse süsteemi koostis
1. Süsteemi omadused
See suudab kaaluda madalal kiirusel mööduvaid sõidukeid ja automaatselt kindlaks teha, kas sõiduki kaal või teljekoormus on ülekoormatud;
See suudab tuvastada sõiduki telgede arvu, teljerühma, teljekaalu ja sõiduki kaalu;
See võib moodustada täieliku sõiduki kaalumisteabe, sealhulgas telje tüübi, telje raskuse, teljegrupi ja kogukaalu;
See saab andmeliidese kaudu arvutisse edastada kaalumisteavet;
Süsteemi põhiosa võtab kasutusele küpsed ja usaldusväärsed seadmed, mis kõik on modulaarse disainiga, kergesti hooldatavad ja laiendatavad, tagades süsteemi kõrge töökindluse.
Süsteemitarkvara on küps, väga usaldusväärne, andmed on täielikud ja tõhusad ning neid saab täielikult jagada, parandades tõhusalt töö efektiivsust ja kõrvaldades võimalikult palju erinevaid halduslünki.
2. Süsteemiprotsess
Veoauto juhitakse ülelaadimisjaama kaalumisrajale ja numbrimärgi tuvastamise süsteem tuvastab numbrimärgi numbri;
Rehvi (telje) identifikaator eristab telgede arvu ja sõiduki kaalumissüsteem hakkab kaaluma, määrama teljerühma ja arvutama teljekoormust.
Kui kõik sõidukid läbivad sõidukite separaatori ja sisenevad kaalumisplatvormile ning kaal on suhteliselt tasakaalus, registreeritakse sõiduki kogukaal ja saadakse teljekoormus.
Kaalumissüsteem saadab kaalumisteabe (auto registreerimismärk, telgede arv, teljekoormus, sõiduki kogukaal jne) tuvastusarvutisse. Arvuti tuvastab, kas kaal on ületatud, ja kuvab ekraanil tuvastusteabe, näiteks sõiduki kaalu, piirangu ületamise ja ületamise määra.
Pärast seda, kui sõiduk on asjakohased toimingud lõpetanud, vabastab sõidukijuhi personal ekraanil kuvatava teabe kohaselt mitte-ülepiiranguga sõidukid tuvastuspiirkonnast lahkumiseks, juhendab ülepiiranguga sõidukeid töötlemiseks jaama piirkonda sisenemiseks, prindib ülepiiranguga sõiduki ülevaatusvormi ja teostab asjakohaseid laadimistoiminguid;
3. Süsteemi koostis ja paigutusplaan
3.1 Süsteemi koostis
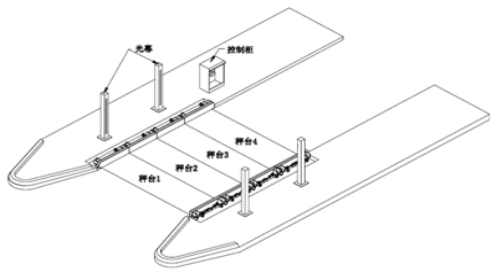
Ülekoormus- ja piirangusüsteem koosneb ZDG neljalaualisest dünaamilisest teljekaalust, juhtseadmest, infrapuna sõidukiseparaatorist, kaalumisplatvormi rattatelje identifikaatorist, juhtkapist (lisavarustus: numbrimärgi tuvastamise süsteem, LED-suurekraaniga kuvamissüsteem, häälkäskluste süsteem, sõiduki juhtimissüsteem, tööstusarvuti, piletiprinter, UPS-katkematu toiteallikas, ülekoormus- ja piirangutuvastussüsteemi tarkvara, jälgimissüsteem) ning muudest lisatarvikutest ja kaablitest.
3.2 Süsteemi paigutusskeem, nagu näidatud:
Töövoog:
1) Sõidukid sisenevad sõidurajale järjestikku, hoides samal ajal ohutut pikivahet, käivitades infrapunase sõidukite eraldusseadme;
2) Sõiduki iga telg läbib mitme pinnaga kaalumisplatvormi;
3) Ekraanikontroller töötleb kaalumisplatvormi andurilt saadud kaalumissignaali ja rattaanduri signaali, eraldab telje vastavalt loogilistele tingimustele ja tegeleb tõhusalt eriolukordadega;
4) Sõiduki tagaosa lahkub mitme pinnaga kaalumisplatvormilt ja infrapunase sõiduki separaatorilt;
5) Ekraanikontroller hindab sõiduki lõppsignaali põhjalikult infrapunase sõidukiseparaatori tuvastatud oklusioonisignaali ja kaalumisanduri poolt saadud kaalumissignaali põhjal;
6) Ekraanikontroller töötleb kaalumissignaali, mis saadakse ülalmainitud sõiduki läbimisel kaalumisplatvormilt;
7) Ekraanikontroller moodustab kogu sõiduki täieliku kaalumisteabe ning täielik kaalumisteave sisaldab sõiduki kiirust, telje tüüpi, teljekaalu, teljerühma kaalu, kogukaalu jne;
8) Lõpetage ühe sõiduki kaalumine ja oodake järgmise sõiduki kaalumist.
9) Kogu tööprotsessi vältel tegeleb süsteem automaatselt mitmesuguste eriolukordadega, näiteks täieliku sisenemise ja täieliku väljumisega, korduva sisenemise ja väljumisega ning pikaajalise viibimisega kaalumisplatvormil;
Süsteem suudab automaatselt ja tõhusalt käsitleda järgmise sõiduki olukorda ning järgmise sõiduki kaalumine ei mõjuta andmete täpsust.

Postituse aeg: 20. veebruar 2025